Motion Bus and Fieldbuses
![]() ***EtherCAT is an open, high-performance Ethernet-based fieldbus system. The development goal of EtherCAT was to apply Ethernet to automation applications which require short data update times (also called cycle times) with low communication jitter (for synchronization purposes) and low hardware costs, PROFINET, etc.), you must make use of the configuration tools.
***EtherCAT is an open, high-performance Ethernet-based fieldbus system. The development goal of EtherCAT was to apply Ethernet to automation applications which require short data update times (also called cycle times) with low communication jitter (for synchronization purposes) and low hardware costs, PROFINET, etc.), you must make use of the configuration tools.
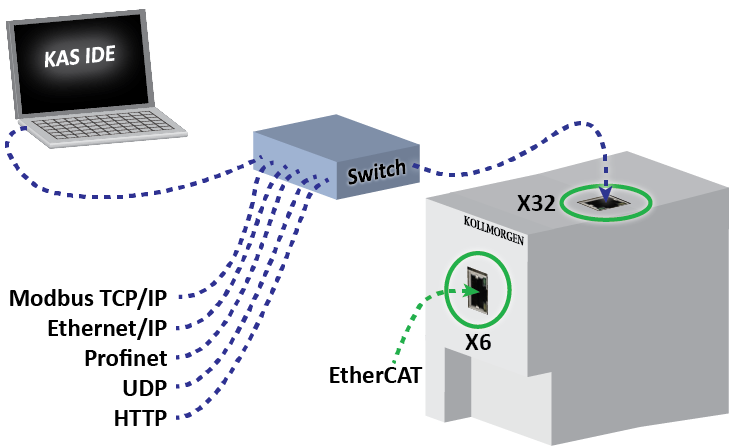
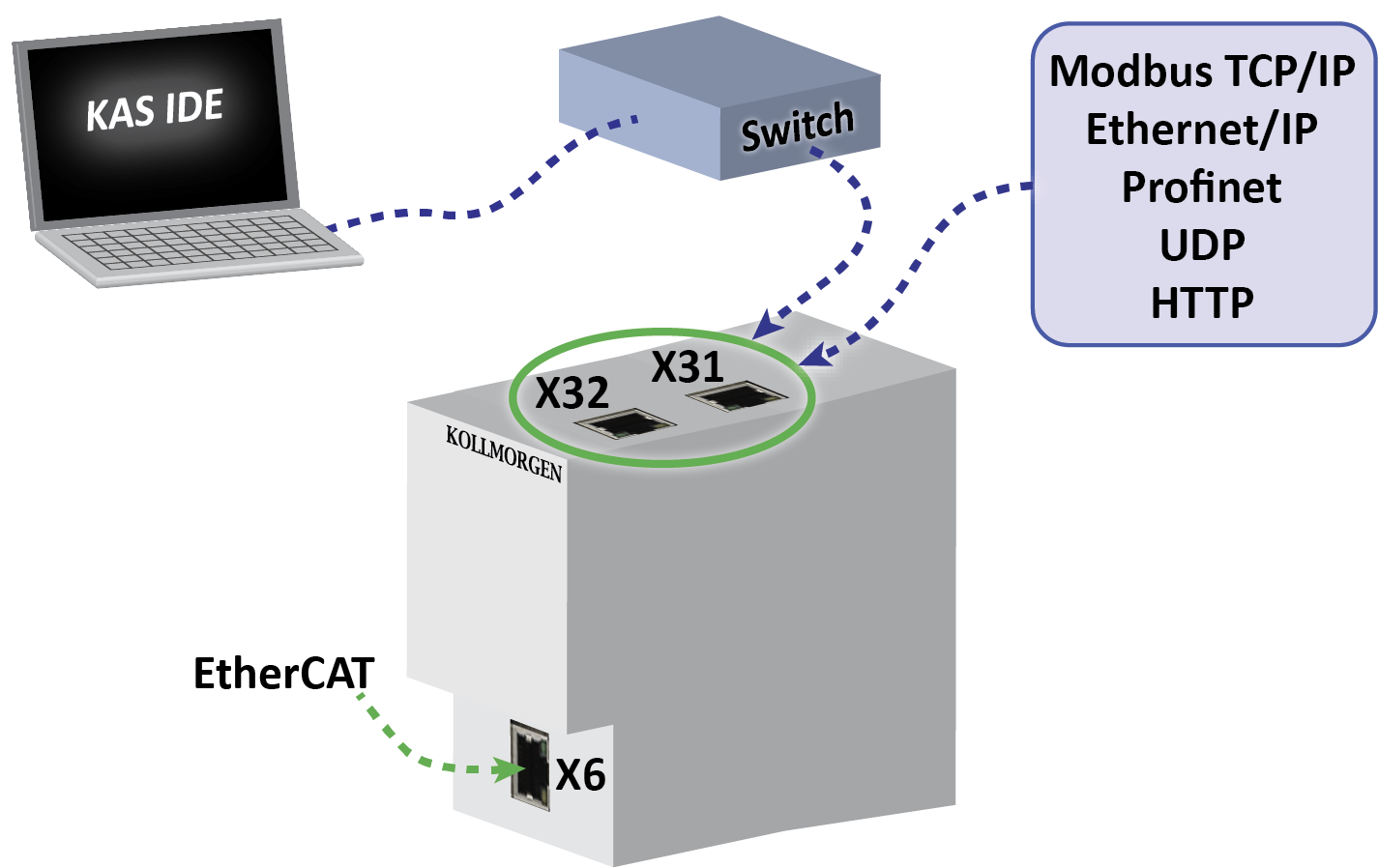
The controller can be connected to multiple Ethernet![]() Ethernet is a large, diverse family of frame-based computer networking technologies that operate at many speeds for local area networks (LANs) devices simultaneously by connecting a switch to the top of the controller:
Ethernet is a large, diverse family of frame-based computer networking technologies that operate at many speeds for local area networks (LANs) devices simultaneously by connecting a switch to the top of the controller:
-
-
See the Controller Performance Guidelines for information on how the CPU load is affected when transmitting and receiving data between network devices and PLC
 "Programmable Logic Controller"
A Programmable Logic Controller, PLC, or Programmable Controller is a digital computer used for automation of industrial processes, such as control of machinery on factory assembly lines.
Used to synchronize the flow of inputs from (physical) sensors and events with the flow of outputs to actuators and events variables.
"Programmable Logic Controller"
A Programmable Logic Controller, PLC, or Programmable Controller is a digital computer used for automation of industrial processes, such as control of machinery on factory assembly lines.
Used to synchronize the flow of inputs from (physical) sensors and events with the flow of outputs to actuators and events variables.
EtherCAT
- For configuration, see Configure EtherCAT Motion Bus.
- For I/O mapping, see Map Input and Output to Variables.
- For error management, see EtherCAT Error Messages.
- For EtherCAT XML "Extensible Markup Language "
XML is a general-purpose markup language. It is classified as an extensible language because it allows its users to define their own tags Device Description, see the Beckhoff website.
EtherNet/IP
The KAS Runtime![]() In computer science, runtime (or run-time) describes the operation of a computer program, the duration of its execution, from beginning to termination (compare compile time).
Within KAS, runtime also refers to the virtual machine that manage the program written in a computer language while it is running includes a fully integrated EtherNet/IP Adapter driver and Scanner driver for exchanging data with EtherNet/IP tag-based devices such as PLCs.
In computer science, runtime (or run-time) describes the operation of a computer program, the duration of its execution, from beginning to termination (compare compile time).
Within KAS, runtime also refers to the virtual machine that manage the program written in a computer language while it is running includes a fully integrated EtherNet/IP Adapter driver and Scanner driver for exchanging data with EtherNet/IP tag-based devices such as PLCs.
- EtherNet/IP Adapter (server), Scanner (client), Tag Client, and FlexIO/Point IO configurations are supported.
- Use drag and drop for mapping PLC variables to PROFINET.
- Setting up EtherNet/IP IO Scanner (Client).
- Setting up EtherNet/IP Adapter (Server).
- Setting up EtherNet/IP Tag Client.
Modbus and TCP/IP
- Setting up Modbus Slave.
PROFINET
This fieldbus is PROFIBUS over Ethernet.
We define one controller and have one or more devices.
Configuration
- For configuring the controller, see Configure a PROFINET IO Controller.
- For configuring devices, see Configure a PROFINET IO Device.






